





Robotyczne owady mogą wydawać się science fiction, ale są stosunkowo nowym zjawiskiem, które polega na wykorzystaniu bodźców elektrycznych do kontrolowania ruchu owadów. Te hybrydowe roboty owado-obliczeniowe, jak się je naukowo nazywa, zwiastują przyszłość małych, wysoce mobilnych i wydajnych urządzeń.
Chociaż poczyniono znaczne postępy, dalszy postęp utrudniają ogromne różnice między różnymi układami nerwowymi i mięśniowymi owadów.
W niedawnym badaniu opublikowanym w czasopiśmie eLife międzynarodowa grupa badawcza zbadała związek między stymulacją elektryczną mięśni nóg patyczaka a wynikającym z tego momentem obrotowym (siła skręcająca powodująca ruch nogi).
Skoncentrowali się na trzech mięśniach nóg, które odgrywają zasadniczą rolę w poruszaniu się owadów: jeden odpowiada za napęd, drugi za usztywnianie stawów i jeden za przechodzenie od pozycji stojącej do machania nogami. Eksperymenty obejmowały unieruchomienie ciała patyczaka i elektryczną stymulację jednego z trzech mięśni nóg w celu wytworzenia ruchów przypominających chodzenie.
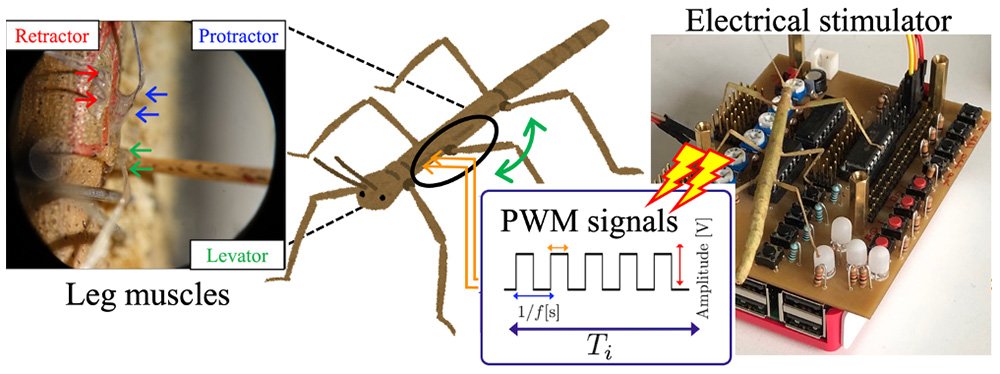
Badaniami kierował Dai Awaki, profesor nadzwyczajny na Wydziale Robotyki Wyższej Szkoły Inżynierii Uniwersytetu Tohoku. Eksperymenty przeprowadzono na Uniwersytecie w Bielefeld w Niemczech, w laboratorium prowadzonym przez profesorów Volkera Dohra i Josepha Schmitza.
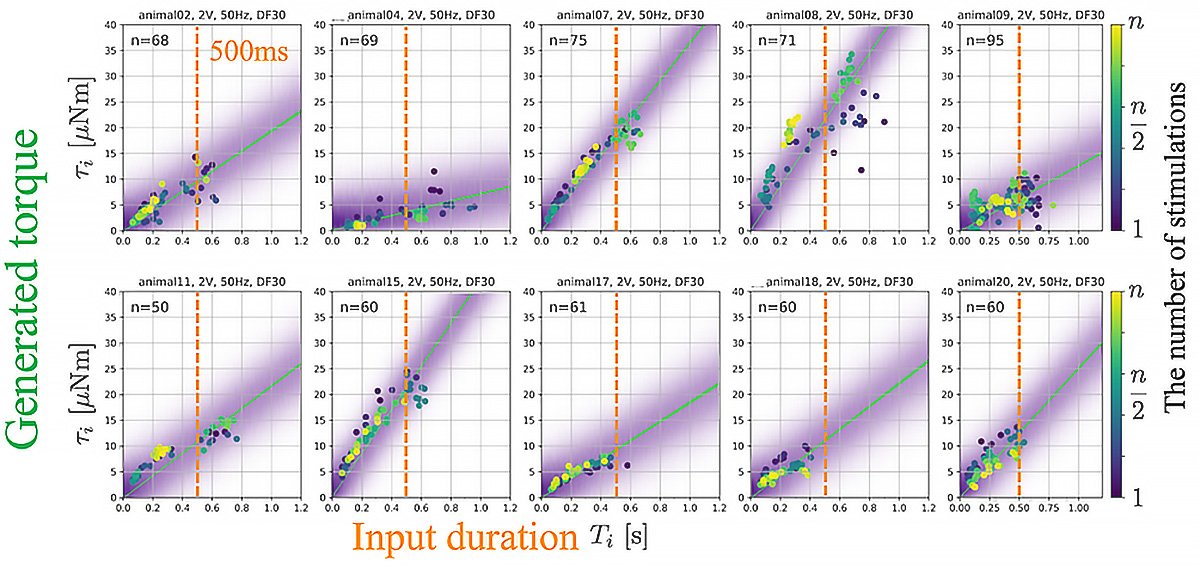
„Na podstawie naszych pomiarów możemy stworzyć model, który przewiduje moment obrotowy wytwarzany w wyniku zastosowania różnych wzorców stymulacji elektrycznej do mięśnia nóg” – zauważa Awaki. „Zidentyfikowaliśmy także niemal liniową zależność między czasem trwania stymulacji elektrycznej a generowanym momentem obrotowym, co oznacza, że możemy przewidzieć wielkość siły skrętnej, którą wytworzymy, po prostu patrząc na długość przyłożonego impulsu elektrycznego”.
Za pomocą zaledwie kilku pomiarów Awaki i jego współpracownicy byli w stanie zastosować to do każdego pojedynczego owada. W wyniku tych wyników naukowcy będą w stanie poprawić kontrolę motoryczną kontrolowanych robotów biohybrydowych, zwiększając precyzję ich ruchów.
Chociaż zespół wie, że ich pomysły mogą zaowocować urządzeniami mobilnymi o dużych możliwościach adaptacji i różnych zastosowaniach, nadal wskazuje na pewne kluczowe wyzwania, którymi należy się zająć. „Po pierwsze, testy modelu należy przeprowadzić na swobodnie chodzących owadach, a stymulatory elektryczne muszą zostać zoptymalizowane, aby lepiej naśladowały naturalne sygnały nerwowo-mięśniowe” – dodaje Awaki.
- Szczegóły publikacji:
Tytuł: Hierarchiczny model zewnętrznego sterowania elektrycznego owada, uwzględniający międzyosobniczą zmienność charakterystyki siły mięśni
Autorzy: Dai Aoki, Volker Dörr, Joseph Schmitz
Magazyn: Życie Elektroniczne
Identyfikator cyfrowy: 10.7554/eLife.85275
/Wydanie ogólne. Ten materiał od oryginalnej organizacji/autora(ów) może mieć charakter chronologiczny i został zredagowany pod kątem przejrzystości, stylu i długości. Mirage.News nie zajmuje stanowisk korporacyjnych ani stron, a wszystkie opinie, stanowiska i wnioski wyrażone w niniejszym dokumencie są wyłącznie opiniami autorów. Zobacz całość tutaj.

„Całkowity miłośnik kawy. Miłośnik podróży. Muzyczny ninja. Bekonowy kujon. Beeraholik.”
More Stories
Prognoza cukrzycy w Australii w 2024 r. | Wiadomości o Mirażu
„Gorąca sauna żabia” pomaga australijskim gatunkom w walce ze śmiercionośnym grzybem
Model sztucznej inteligencji poprawia reakcję pacjentów na leczenie raka